FLYING GPR
BEZZAŁOGOWY SYSTEM INSPEKCJI STANU TECHNICZNEGO WYSOKOŚCIOWYCH OBIEKTÓW KOMINOWYCH, BAZUJĄCY NA PROFILOWANIU GEORADAROWYM MODELU 3D
NA CZYM POLEGA INNOWACYJNOŚĆ PROJEKTU?
ELIMINACJA BŁĘDÓW
Proponowany system inspekcji zapewnia 95% skuteczności wykrywania uszkodzeń.
BEZPIECZEŃSTWO
Pomiary wykonywane przez system będą w pełni automatyczne i bezpieczne.
ORYGINALNOŚĆ
Opracowany system będzie stanowić całkowitą nowość, zarówno produktową, jak i procesową.
POMYSŁODAWCA PROJEKTU
CO PROPONUJE?
Pomysłodawca proponuje innowacyjne rozwiązanie, które polegać będzie na opracowaniu prototypu nowego zrobotyzowanego systemu o charakterystyce stanowiącej zupełną nowość w stosunku do oferty konkurencji.

KIM JEST?
Pomysłodawca posiada wieloletnie doświadczenie w zarządzaniu nieruchomościami oraz w prowadzeniu działalności gospodarczej. Podczas realizacji pewnej inwestycji, zauważył w jednej z kamienic problem z pękaniem ścian/pogorszeniem stanu konstrukcji nieruchomości.
CEL GRANTOBIORCY
Celem Grantobiorcy będzie przeprowadzenie badań oraz, w końcowym efekcie, stworzenie prototypu innowacyjnego bezzałogowego systemu do inspekcji obiektów kominowych (m.in. chłodni kominowych), bazującego na profilowaniu georadarowym w modelu 3D. Nowy, autorski, zrobotyzowany system będzie wykorzystywany przez Grantobiorcę do świadczenia usługi wysoce precyzyjnej diagnostyki obiektów kominowych (95% skuteczności wykrywania uszkodzeń), stanowiąc bezpośrednią odpowiedź na zgłaszane zapotrzebowanie ze strony grupy docelowej (głównie elektrowni).
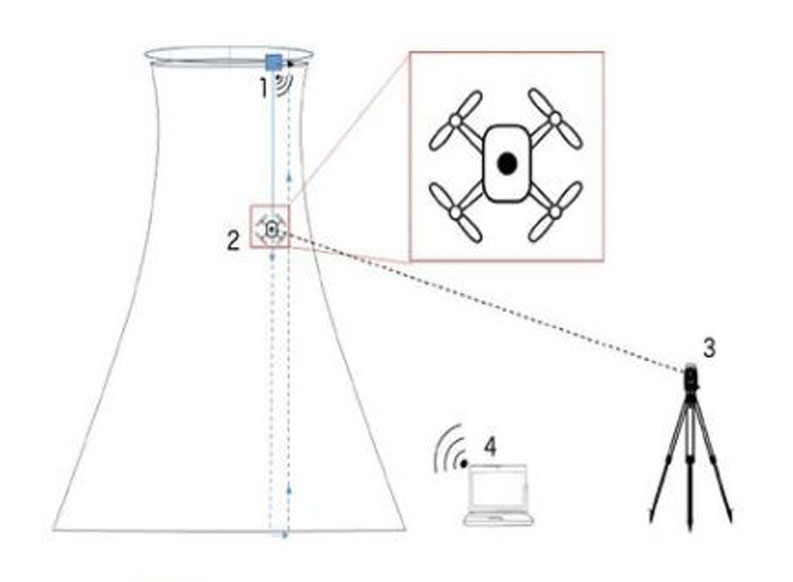
ZAKRES PROJEKTU
Zakres Projektu dotyczy nowego rozwiązania, polegającego na opracowaniu zrobotyzowanej obręczy robota o zmiennej średnicy wyposażonej w 4 pakiety anten georadarowych. Robot będzie opuszczany w sposób automatyczny ze szczytu chłodni kominowej, wykonując profilowanie georadarowe. Obręcz automatycznie dopasuje swoją średnicę do średnicy zewnętrznej chłodni na danej wysokości. Będzie to możliwe dzięki wprowadzeniu wcześniej modelu obiektu do pamięci robota i czujnikom odległości umieszczonymi na obręczy. Pomiary wykonane za pomocą stworzonego oprogramowania zostaną następnie automatycznie przeanalizowane zobrazowane na modelu 3D badanego obiektu kominowego. Proces inwentaryzacji uszkodzeń zostanie w pełni zautomatyzowany, eliminując tym samym zagrożenia dla życia i zdrowia ludzi.